2
All information contained herein is the exclusive copyright of Round Bank Engineering Ltd and is not to by copied,
duplicated or otherwise distributed without the express permission of Round Bank Engineering Ltd, Unit 7, Victoria
Contents
Overview.................................................................................................................................................4
Specifications ..........................................................................................................................................4
Connections ............................................................................................................................................5
Power Supply Connections .................................................................................................................5
Motor Connections.............................................................................................................................5
Analogue Input....................................................................................................................................6
Onboard Pot........................................................................................................................................6
UART Connections ..............................................................................................................................6
Programming Pin Connections............................................................................................................7
UART Control...........................................................................................................................................8
Using the UART ...................................................................................................................................8
Using ZDA010 software to set parameters.............................................................................................9
Getting Started / Setup.......................................................................................................................9
Port Setup .........................................................................................................................................10
Finding the right COM Port...............................................................................................................11
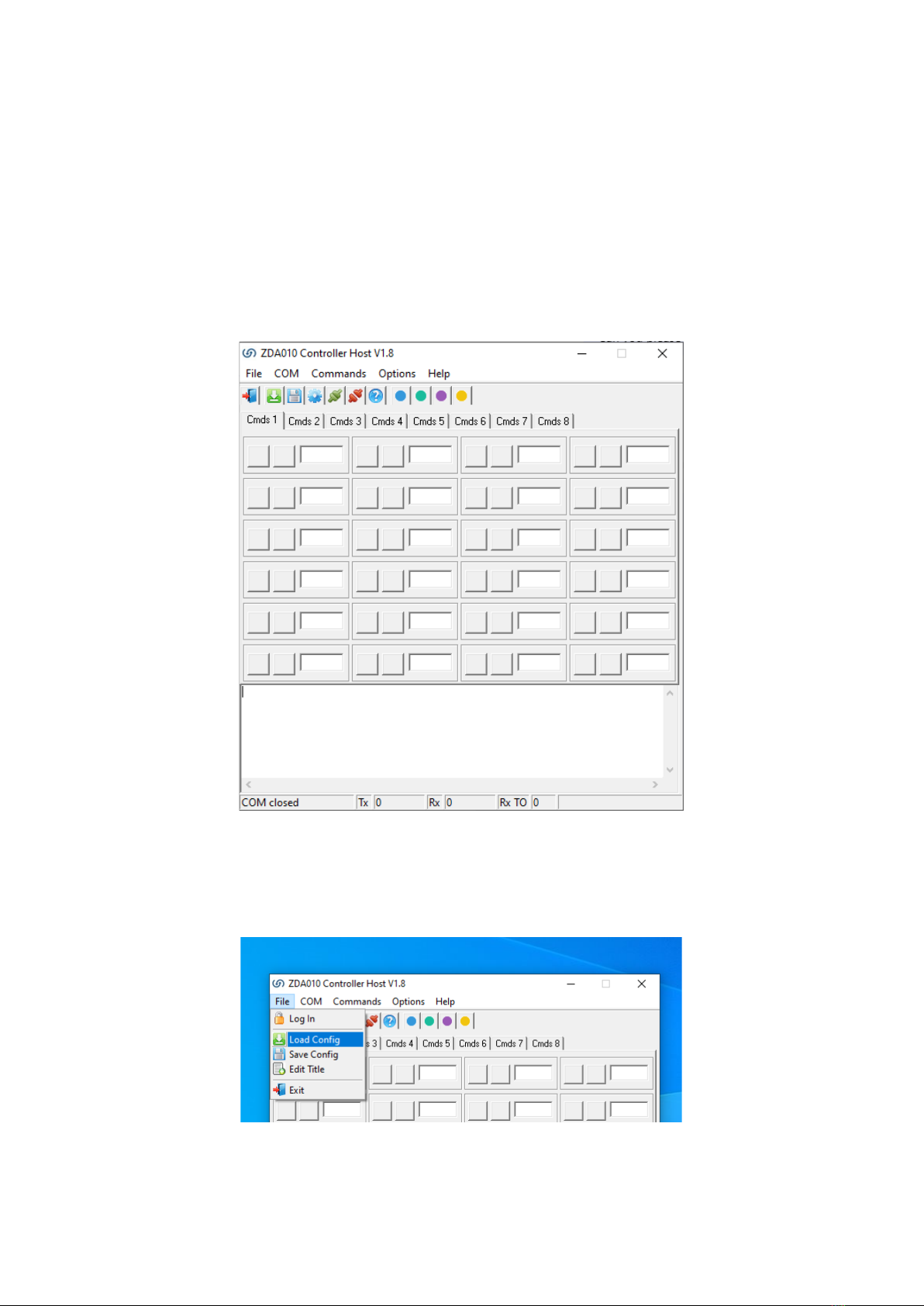
ZDA010 1.8 Overview........................................................................................................................12
Commands and Parameters..............................................................................................................13
General TAB ......................................................................................................................................14
Control Setup TAB.............................................................................................................................15
Drive Setup TAB ................................................................................................................................16
ZDA Commands.....................................................................................................................................17
COM Port Settings.............................................................................................................................17
Sending Commands ..........................................................................................................................17
Writing Commands ...........................................................................................................................17
General Commands ..........................................................................................................................18
Control Setup Commands.................................................................................................................19
Drive Setup Commands.....................................................................................................................20
Command & Parameter Details ............................................................................................................21
Control Setup Data Items..................................................................................................................21
Fault Codes & Fault Data ..................................................................................................................21
Invert Settings...................................................................................................................................21
Start Delay.........................................................................................................................................22
Analogue Scalers (Multiplier and Divider) ........................................................................................22