3
Contents
Introduction .................................................................................................................................... 4
Hardware and Software Setup........................................................................................................ 6
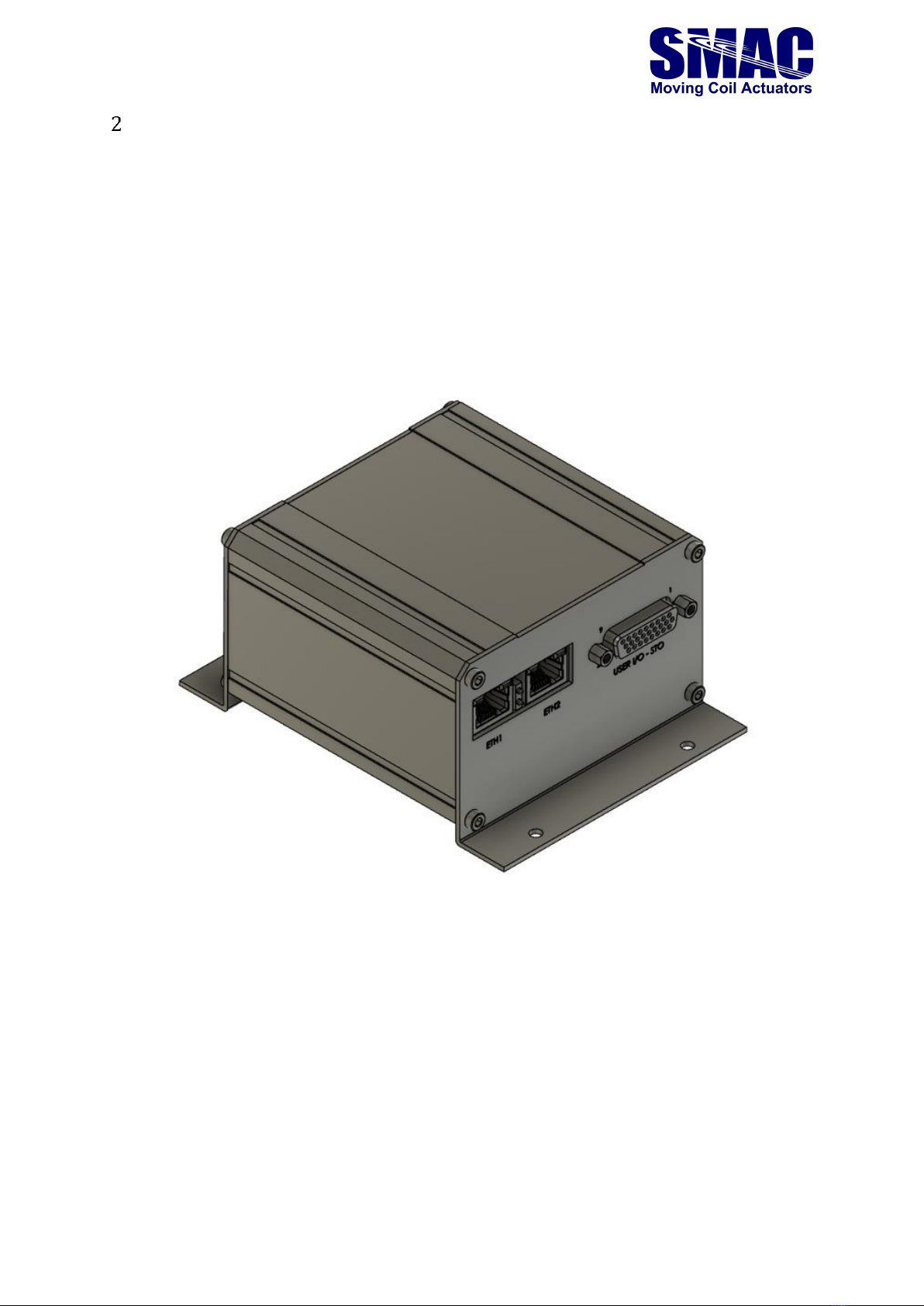
2.1 Hardware................................................................................................................................. 6
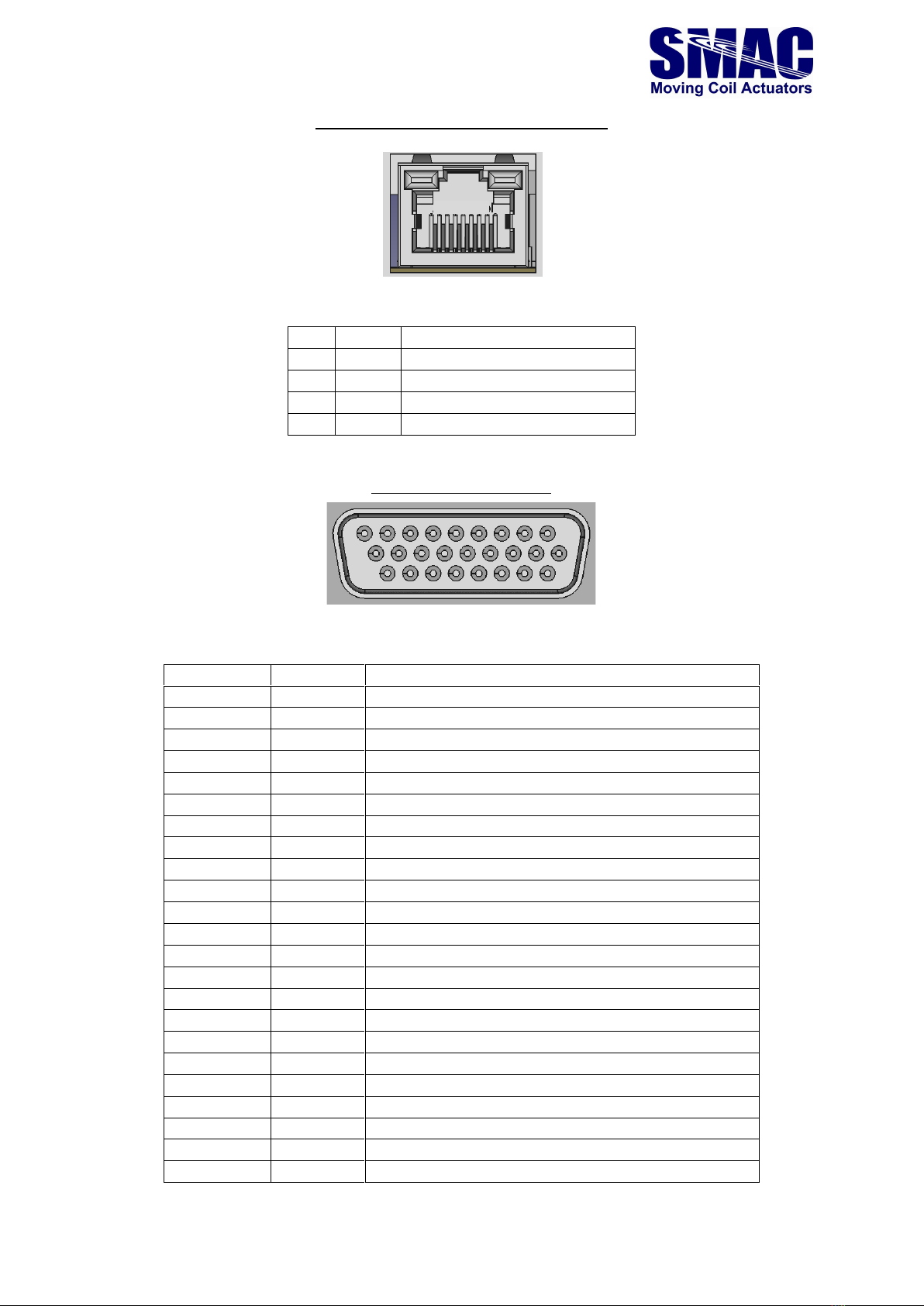
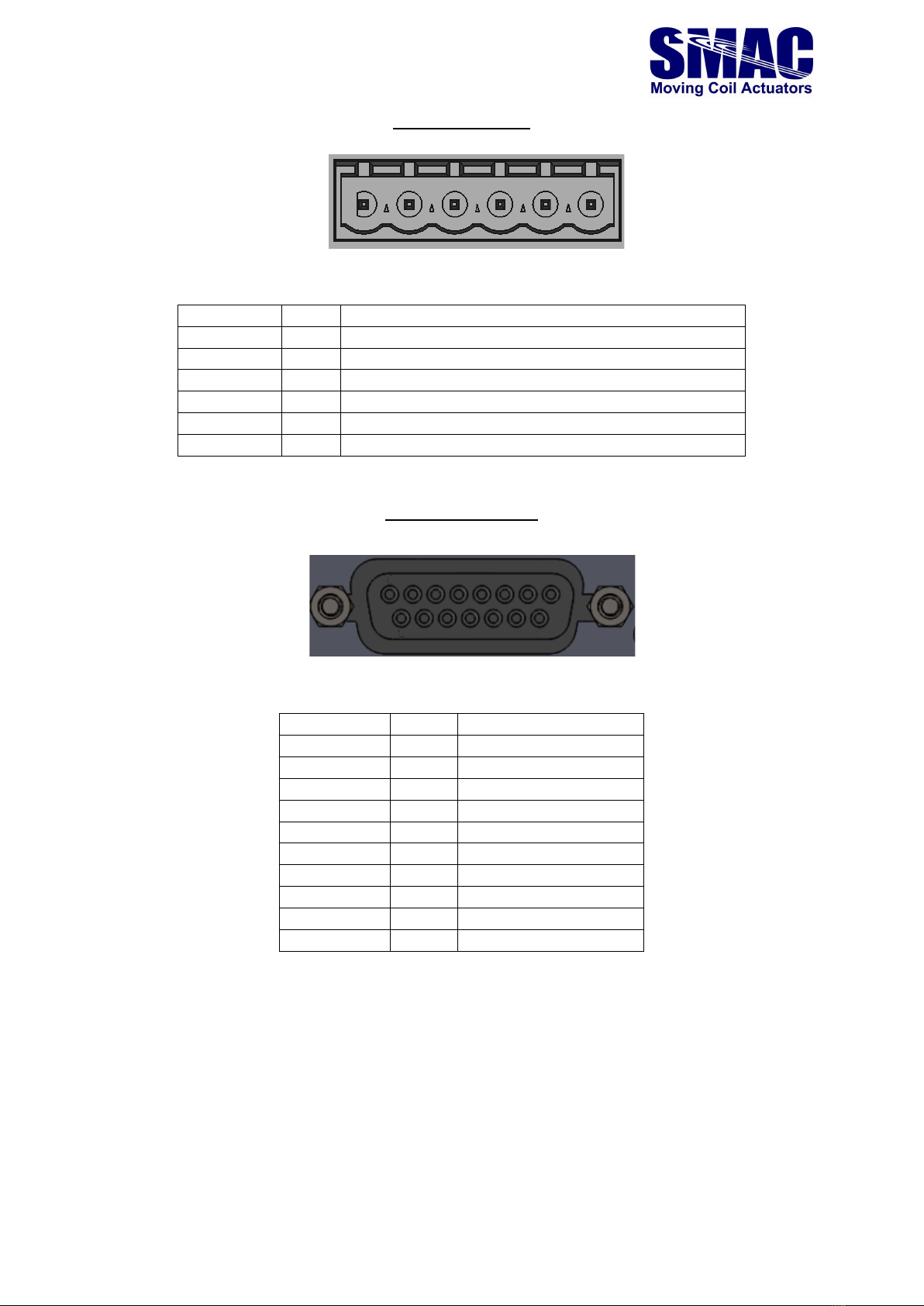
2.1.1 Power/signal/communication connectors...................................................................... 6
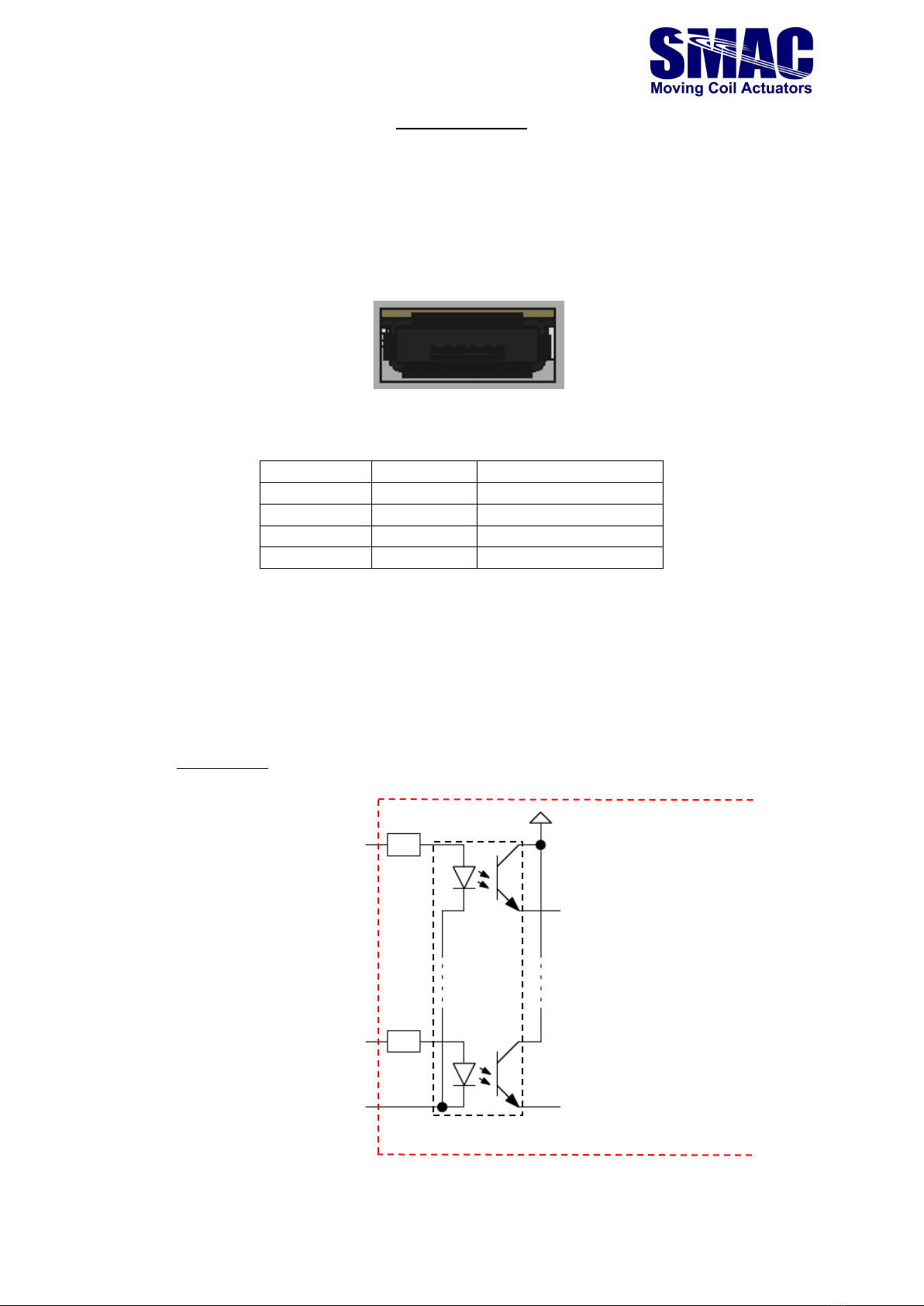
2.1.2 I/O electrical schematics ............................................................................................... 10
2.1.3 Optional: disabling the STO........................................................................................... 12
2.2 Software Setup...................................................................................................................... 13
2.2.1 VLC configuration .......................................................................................................... 13
2.2.2 Connecting VLC-ETC to an EtherCAT network (with a TwinCAT example).................... 13
Programming the VLC-ETC ............................................................................................................ 16
3.1 Servo objects......................................................................................................................... 16
3.1.1 Acyclic servo objects...................................................................................................... 16
3.1.2 Cyclic servo objects ....................................................................................................... 18
3.2 Executing motion through servo objects .............................................................................. 22
3.3 Example: executing homing with TwinCAT under Config mode........................................... 22
3.4 Example: programming a sequence of motions with TwinCAT PLC under Run mode.......... 25
3.5 Example: programming a 2-axis linear-rotary actuator ........................................................ 35
A Appendix A: VLC System Macros................................................................................................... 49