moog MSD Servo Drive User Manual SERCOS III 5
Table of contents
1 Safety ...................................................................................... 7
1.1 Measures for your safety.........................................................................................7
1.2 Read the Operation Manual first!............................................................................7
1.3 Introduction to the SERCOS III interface ..................................................................7
1.4 Key features ............................................................................................................8
1.5 Abbreviations..........................................................................................................9
2 Assembly and connection .......................................................11
2.1 Installation and wiring.............................................................................................11
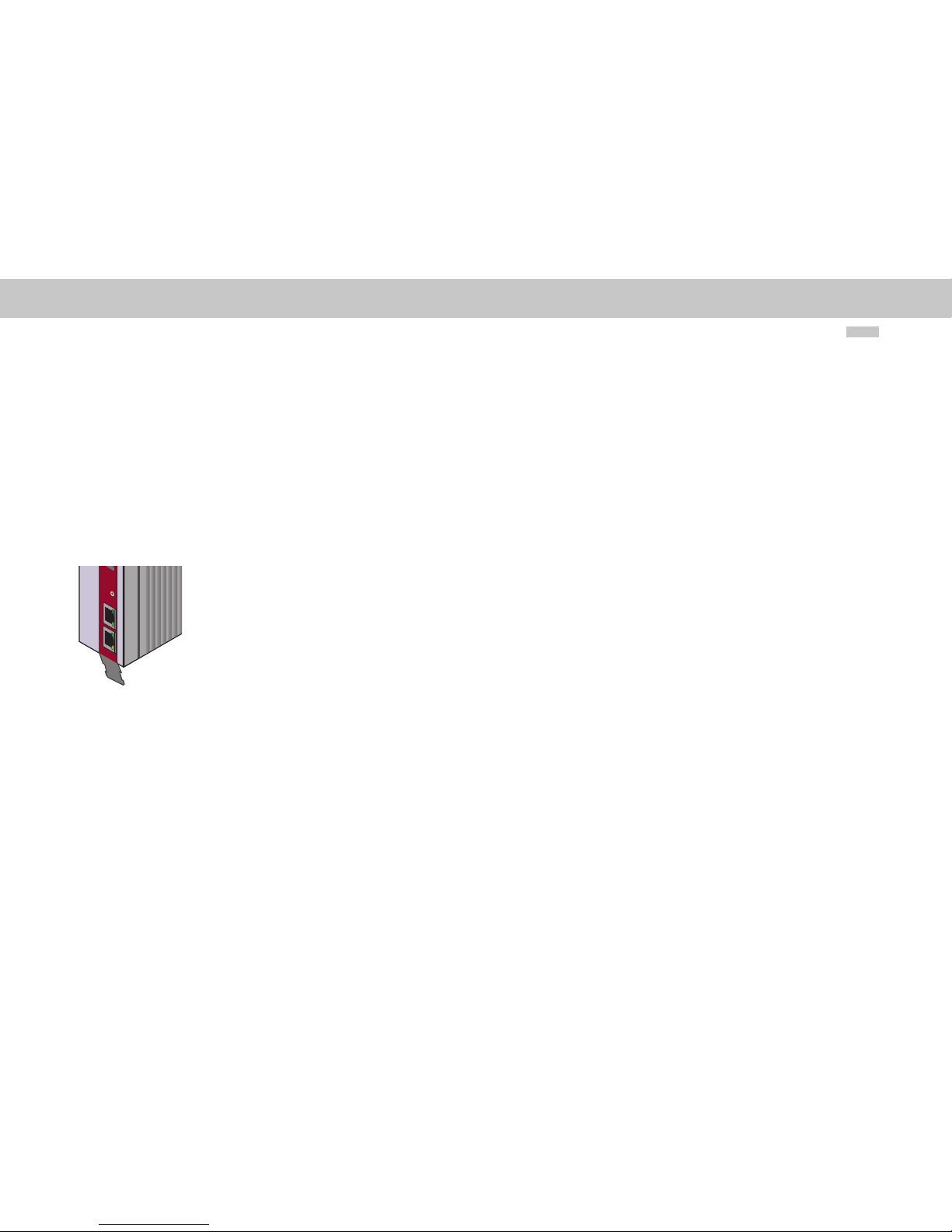
2.2 Pin assignment of the RJ-45 socket.........................................................................11
2.3 Meanings of LEDs ...................................................................................................12
2.4 Indication of operating states on 7-segment display ...............................................12
2.5 Hardware enable ....................................................................................................13
3 Commissioning and configuration .......................................... 15
3.1 Commissioning .......................................................................................................15
3.2 Commissioning sequence........................................................................................15
3.3 Setting the slave bus address ..................................................................................16
4 Parameter setting................................................................... 17
4.1 Format of SERCOS III parameters.............................................................................17
4.1.1 Standard parameters (S-0-xxxx.x.x).............................................................17
4.1.2 Manufacturer-specific parameters P-0-xxxx ....................................................17
4.2 Operation modes ...................................................................................................17
4.3 Real-time bits..........................................................................................................19
5 Data transfer ......................................................................... 21
5.1 Communication phases...........................................................................................21
5.2 Cyclic data transfer..................................................................................................21
5.2.1 Mapping of configurable real-time data ......................................................21
5.2.2 Drive control word S-0-0134.0.0.......................................................................21
5.2.3 Description of bits 13-15..............................................................................22
5.2.4 Drive status word S-0-0135.0.0.........................................................................23
5.2.5 Non-configurable real-time data..................................................................24
5.3 Data transfer via the service channel (SVC) .............................................................24
5.4 IP channel ...............................................................................................................25
5.4.1 Parameter setting ........................................................................................25
5.4.2 SERCOS III IP address ...................................................................................25
6 Scaling and weighting ........................................................... 27
6.1 Weighting of position data .....................................................................................27
6.1.1 Weighting of translatory position data.........................................................27
6.1.2 Weighting of rotary position data................................................................27
6.1.3 Modulo weighting.......................................................................................29
6.1.4 Position polarity...........................................................................................29
6.2 Weighting of velocity data ......................................................................................30
6.2.1 Weighting of translatory velocity data .........................................................30
6.2.2 Weighting of rotary velocity data.................................................................30
6.2.3 Speed polarity .............................................................................................31
6.3 Weighting of acceleration data ...............................................................................32
6.3.1 Weighting of translatory acceleration data ..................................................32
6.3.2 Weighting of rotary acceleration data..........................................................32
6.4 Weighting of torque and force data........................................................................33
6.4.1 Percentage weighting of torque and force data ...........................................33