© 2020 ScaraBot Technologies GmbH All Rights Reserved 7
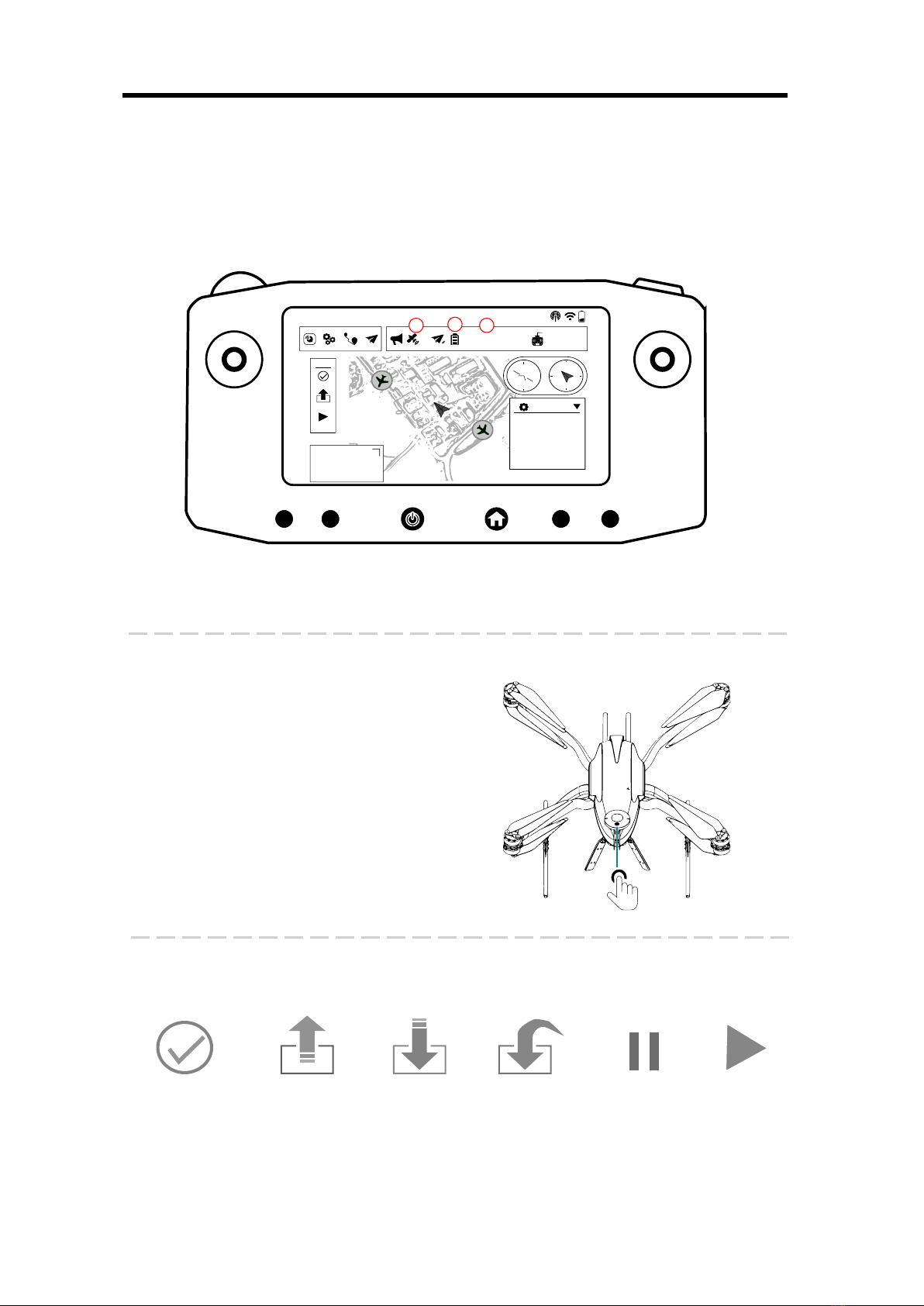
Balance the UAV.
1. Remove the Hood
2. Place the Battery on the top of the frame.
3. Lift the vehicle as shown in the picture.
4. If the UAV tilt to the front or back move the battery and/or the payload in order
to balance.
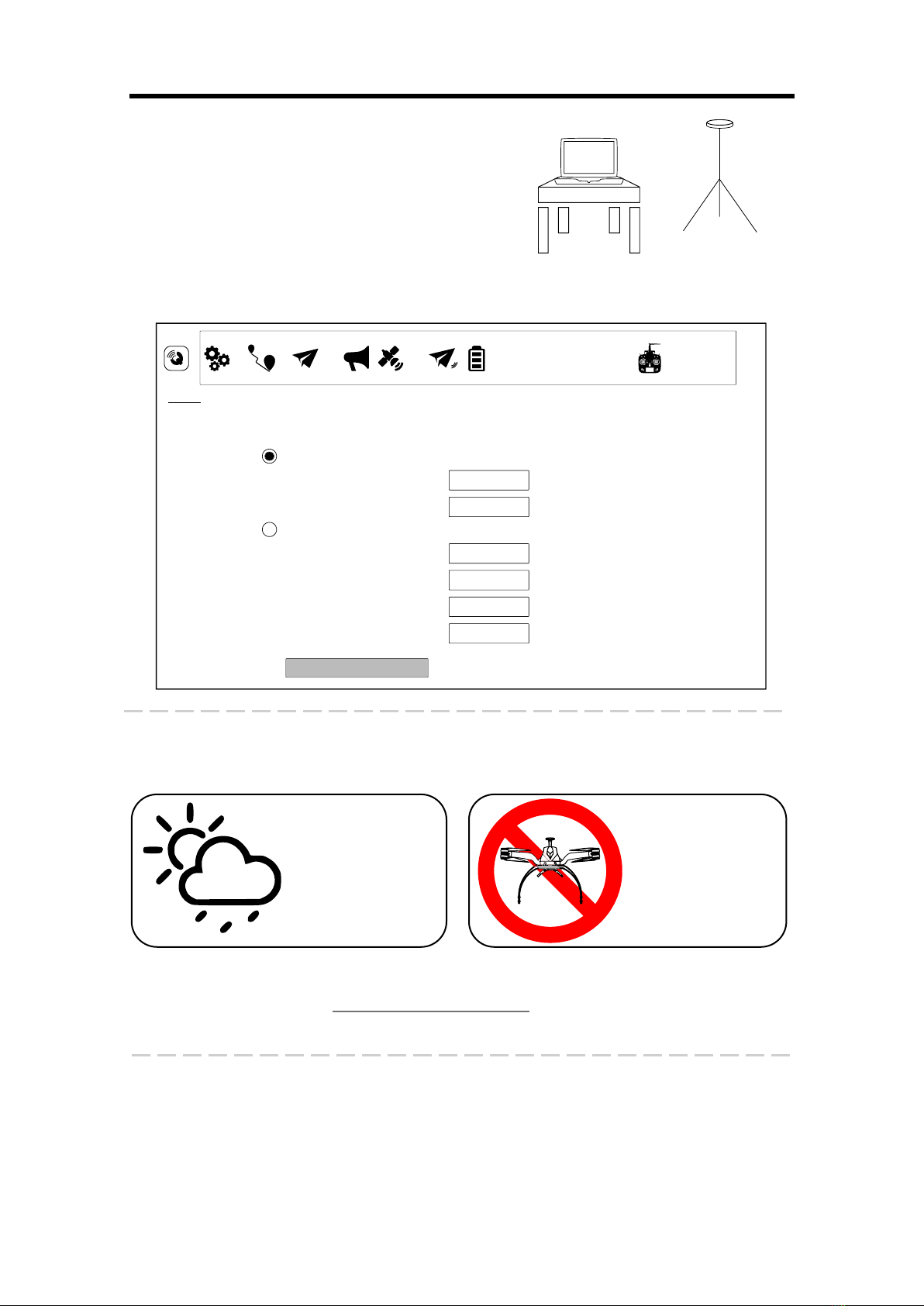
3. Prepare Remote Controller
Once the Remote control is active the connection will
automatically start. Check the connection is stablish and
before fly place the antennas correctly.
4. Before Flying
Compass Calibration
* Calibration has to be perform any time the aircraft requires it. In addition it should be
done every time the start point varies more than 100km.

















 Manuel utilisateur")







