Tessera Technology AD-MS/PJ4 Manuel utilisateur

Motor Sensor Board
(AD-MS/PJ4)
Hardware Manual
Date published: July 2011 (First Edition)
Tessera Technology Inc.
- 1 -

CAUTION:
・ The information in this document is subject to change without notice.
・ No part of this document may be copied or reproduced in any form or by any means without
prior written consent of Tessera Technology Inc.
・ Tessera Technology Inc. assumes no responsibility for inaccuracies or misprints of this
document.
・ Tessera Technology Inc. does not license assurance or enforcement of intellectual property
rights and other rights of Tessera Technology Inc. and third parties by the use of the
products and/or the information in this document. Tessera Technology Inc. does not
assume any liability for infringement of rights of third parties by the use of the products
and/or the information in this document.
・ Descriptions of circuits, software and other related information in this document are
provided for illustrative purposes in semiconductor product operation and application
examples. The incorporation of these circuits, software and information in the design of a
customer's equipment shall be done under the full responsibility of the customer. Tessera
Technology Inc. assumes no responsibility for any losses incurred by customers or third
parties arising from the use of these circuits, software and information.
- 2 -

TABLE OF CONTENTS
1······································································································ 4Introduction
2··········································································································· 5Features
2.1
Resolver 1 I/O Connector (CN12)··········································································6
2.2
Motor Control 1 Connector (CN14) ········································································8
2.3
Analog Input Connector (CN7) ··············································································9
2.4
Digital I/O Connector (CN10) ············································································· 11
····································································································· 122.4.1 CAN
··································································································· 132.4.2 UART
·························································································· 152.4.3 Digital Output
····························································································· 162.4.4 Digital Input
2.5
Power Supply································································································· 17
- 3 -

1Introduction
This manual describes the features and hardware specifications of the Motor Sensor Board
(AD-MS/PJ4). The Motor Sensor Board is used with connecting to EB-850/PJ4E, which the 32-bit
single-chip microcomputer V850E2/PJ4-E from Renesas Electronics Corporation is mounted on.
- 4 -
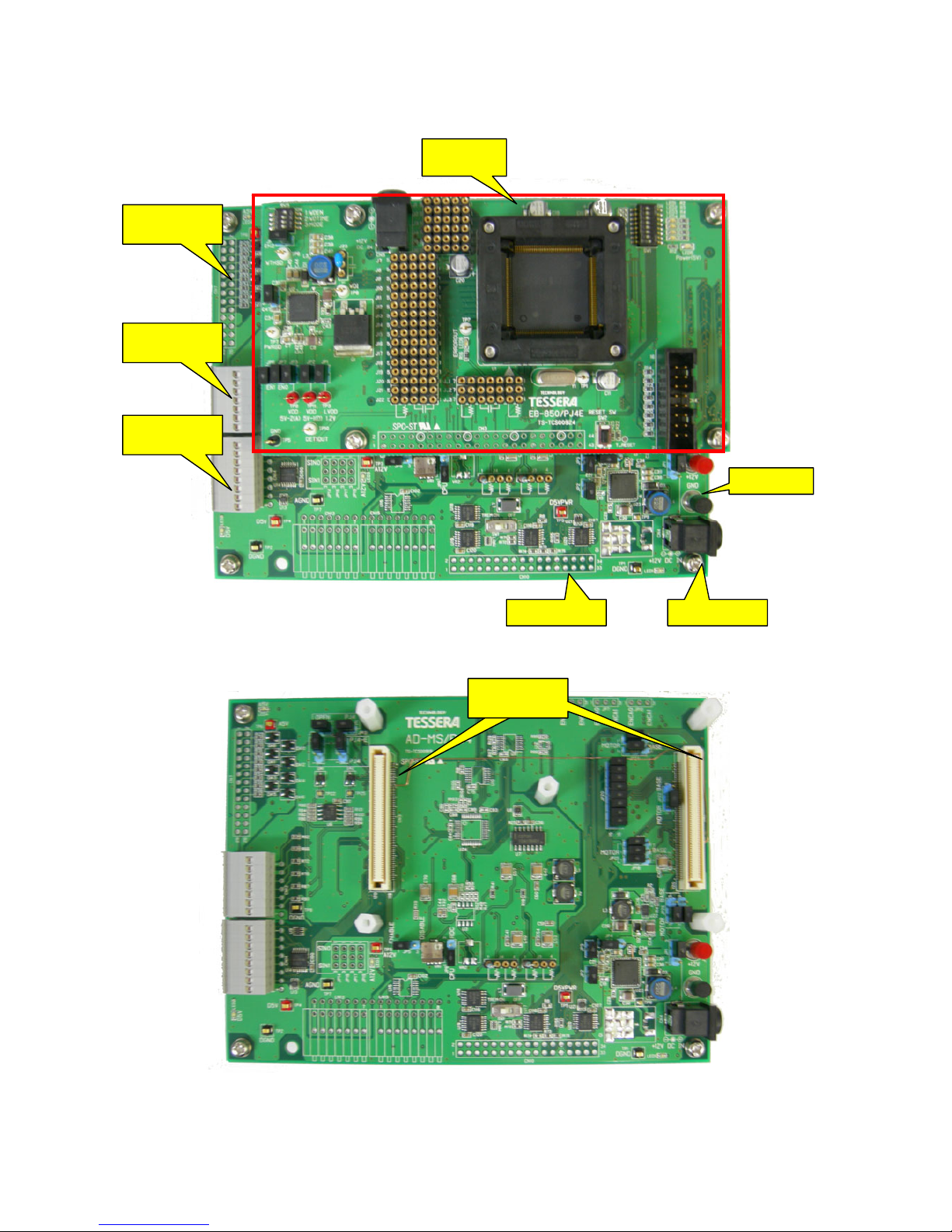
2Features
CPU Board
Analog Input
Connector
Resolver 1
I/O Connector
Motor Control 1
Connector
Power
Digital I/O AC Adopter Input
CPU 用ボード接続
CPU Board
Connectors
- 5 -

2.1 Resolver 1 I/O Connector (CN12)
This is the connector for excitation signals for resolver and SIN / COS signals for detection
coil.
Excitation signal outputs PWM signals through LPF (this can be set to disable. JP3) and
current AMP. It has variable resistance for level adjusting. Also, at the current AMP, it can
change the feedback adjusting resistance (J3,J4). As the default setting, the resistance is set
to 10kΩ. The feedback adjusting resistance can implement two parallel connections in one
socket.
The adjusting variable resistance (VR1) is a variable resistance of 20KΩ.
Connector Pin Signal Function
Number
1 Excitation Output +
2 Excitation Output -
3 SIN Input +
4 SIN Input -
5 COS Input +
CN12
6 COS Input -
7 AGND
The SIN, COS, and excitation signal of the detection coil are adjusted to the input level of the
microcomputer. It is connected to the microcomputer after noise canceling by LPF that is set
to Fc=234kHz for the level conversion and noise canceling purpose.
1-2 LPF Enable
JP5 2-3 LPF Disable
LPF Enable/Disable
Switch
Adjusting Variable
Resistance
Feedback Adjusting
Resistance
Feedback Adjusting
Resistance
J4
XR2C-3211-N(4pin)
3
4
1
2
J3
XR2C-3211-N(4pin)
3
4
1
2
- 6 -
For V850E2/PJ4-E, connections to CPU terminals are shown below.
Signals CPU Terminals
PWM Output P1_8/TPB0O/CSIG0SO/UARTH0TXD
Excitation Input + ADCA1I1/DFR10IM0
Excitation Input - DFR10IP0
SIN Input + ADCA1I2/DFR10IM1
SIN Input - DFR10IP1
COS Input - ADCA1I3/DFR10IM2
COS Input - DFR10IP2
- 7 -

2.2 Motor Control 1 Connector (CN14)
Motor Control 1 Connector is a connector to output digital signals for six-phase motor. It
connects six digital signals for UVW and one digital signal for gate block. The output is an open
drain output. It pulls up with 1KΩ for internal 5V.
Connector Signal Function
Pin Number
1 6-Phase PWM (Motor Control 1) U
2 6-Phase PWM (Motor Control 1) _U
3 6-Phase PWM (Motor Control 1) V
4 6-Phase PWM (Motor Control 1) _V
5 6-Phase PWM (Motor Control 1) W
6 6-Phase PWM (Motor Control 1) _W
CN14 7 Gate Block Output 1
8 DGND
Signals CPU Terminals
6-Phase PWM (Motor Control 1) U P1_1/TSG20O1
6-Phase PWM (Motor Control 1) _U P1_2/TSG20O2
6-Phase PWM (Motor Control 1) V P1_3/TSG20O3
6-Phase PWM (Motor Control 1) _V P1_4/TAUJ0O0/TSG20O4
6-Phase PWM (Motor Control 1) W P1_5/TAUJ0O1/TSG20O5
6-Phase PWM (Motor Control 1) _W P1_6/TAUJ0O2/TSG20O6
Gate Block Output 1 P4_2/UARTH2RTS/TSG20PTSI1/ENCA0E1/CSIG2SO
- 8 -
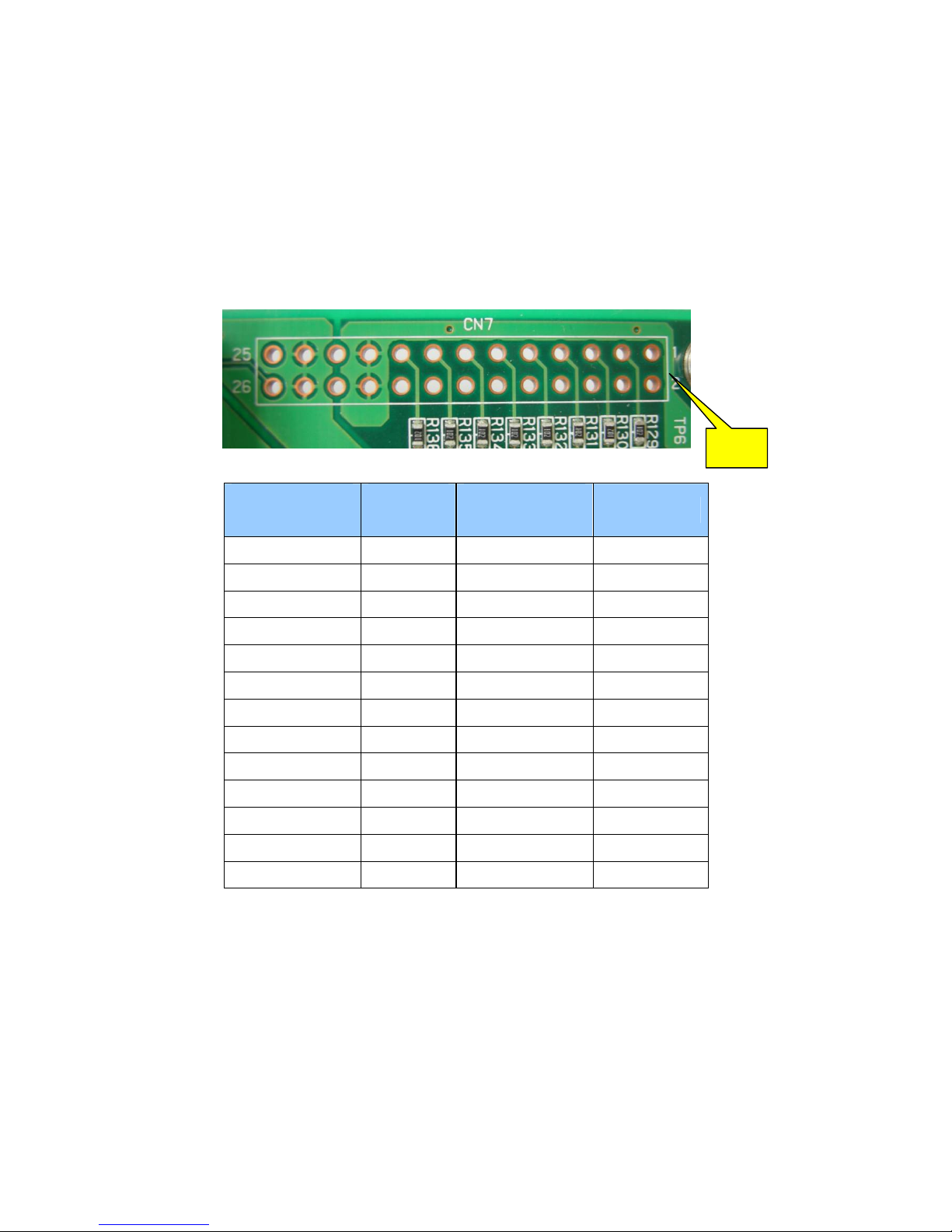
2.3 Analog Input Connector (CN7)
The Analog Input Connector is connected to CPU analog input terminal with adding protection
diode and resistance. The connector itself is not mounted, and it is 2.54pitch through-hole.
To use it for controlling, it has 1 digital input function. For some analog and digital signals, the
connection destination can be changed by JP settings.
CN7
Connector Pin Signal Connector Pin Signal Function
Number Function Number
1 A5V 2 A5V
3 ADCA0I1 4 ADCA0I2
5 ADCA0I3 6 ADCA0I4
7 AIN0 8 AIN1
9 ADCA0I14 10 ADCA0I15
11 ADCA0I16 12 ADCA0I17
13 ADCA0I18 14 ADCA0I19
15 ADCA0I20 16 ADCA0I21
17 ADCA0I22 18 ADCA0I8
19 AGND 20 AGND
21 NC 22 NC
23 DGND 24 DGND
25 DGND 26 Digital Input
- 9 -
Signals CPU Terminals
ADCA0I1 ADCA0I1
ADCA0I2 ADCA0I2
ADCA0I3 ADCA0I3
ADCA0I4 ADCA0I4
ADCA0I14 ADCA0I14
ADCA0I15 ADCA0I15
ADCA0I16 ADCA0I16
ADCA0I17 ADCA0I17
ADCA0I18 ADCA0I18
ADCA0I19 ADCA0I19
ADCA0I20 ADCA0I20
ADCA0I21 ADCA0I21
ADCA0I22 ADCA0I22
ADCA0I8 ADCA0I8
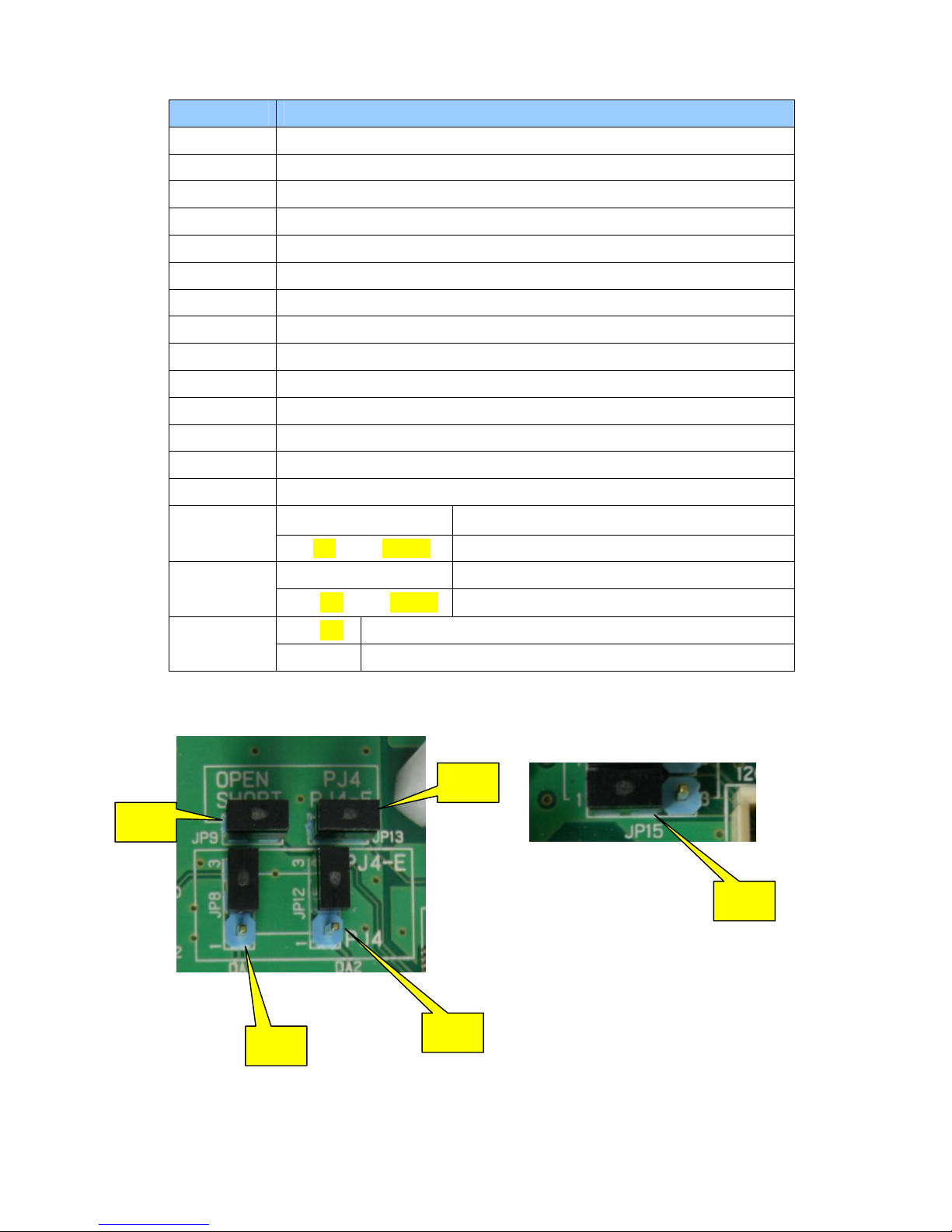
JP8:1-2 JP9:OPEN ADCA0I5
AIN0
JP8:2-3 JP9:SHORT ADCA0I10
JP12:1-2 JP13:OPEN ADCA0I6
AIN1 JP12:2-3 JP13:SHORT ADCA0I11
JP15:1-2 P0_5/TAUJ0I2/TAUJ0O2/UARTH2RXD/INTP2/CSIG0SI
Digital Input JP15:2-3 OPEN
JP13
JP9
JP15
JP12
JP8
- 10 -
Table des matières

















