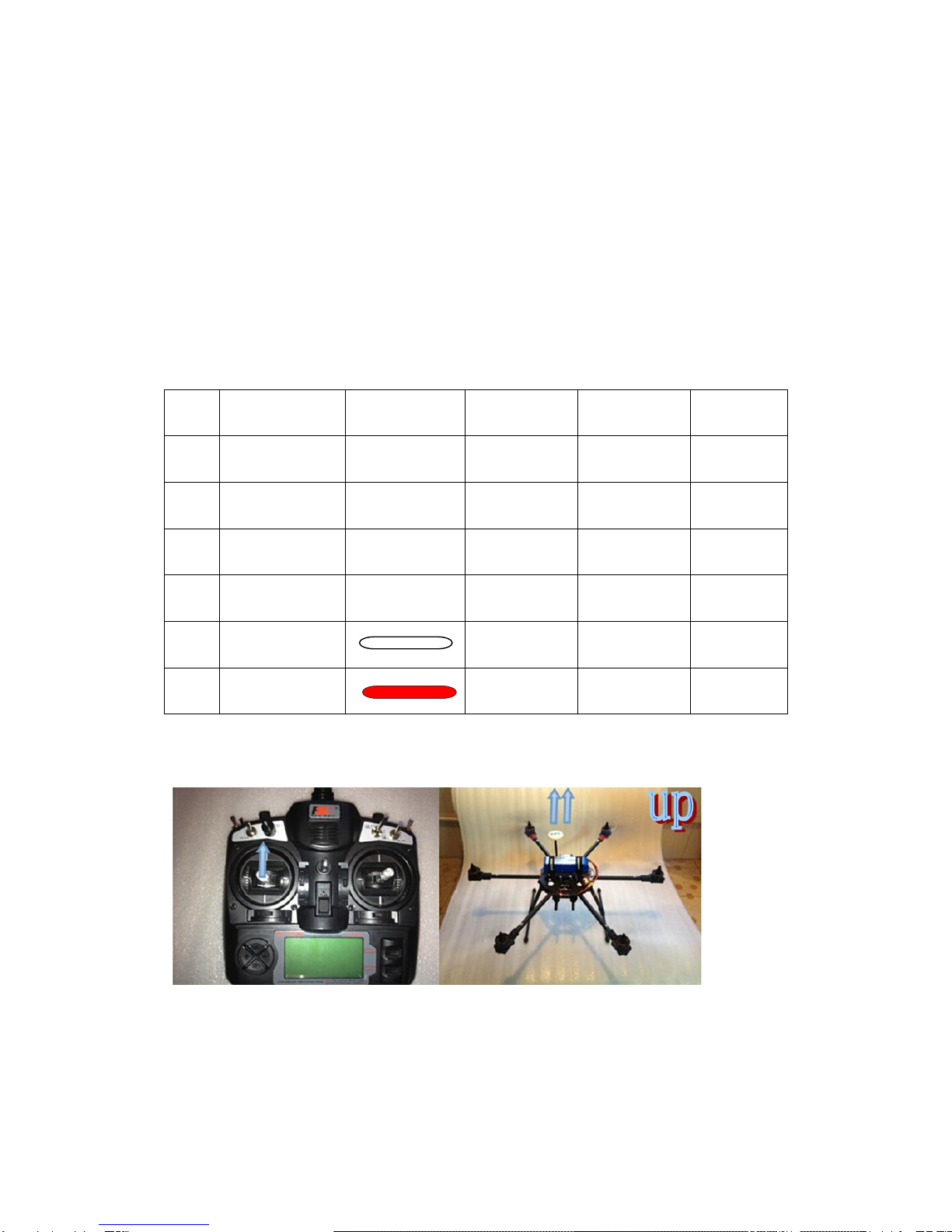
(1). Connect battery to aircraft and keep still(no any vibration).
(2). Switch to manual mode(“N”position”) .
(3). Switch between manual mode(“N”position”) and position hold mode(“1”position) for 6 times and two
switch time interval not longer than 3 seconds, process: “N”position→“1”position →“N”position→“1”
position→“N”position→“1”position→“N”position→“1”position→“N”position→“1”position→“N”
position→“1”position
(4). White indicator light of aircraft light up about 1 second.
(5). Gyro initialization ends while white light goes out.
5. Compass calibration
Magnetic filed sensor is in-built on flight controller, it can detect general orientation, if magnetic field is
interfered, it will fly in a circle and cannot hover accurately while in hovering mode. At this situation, it will
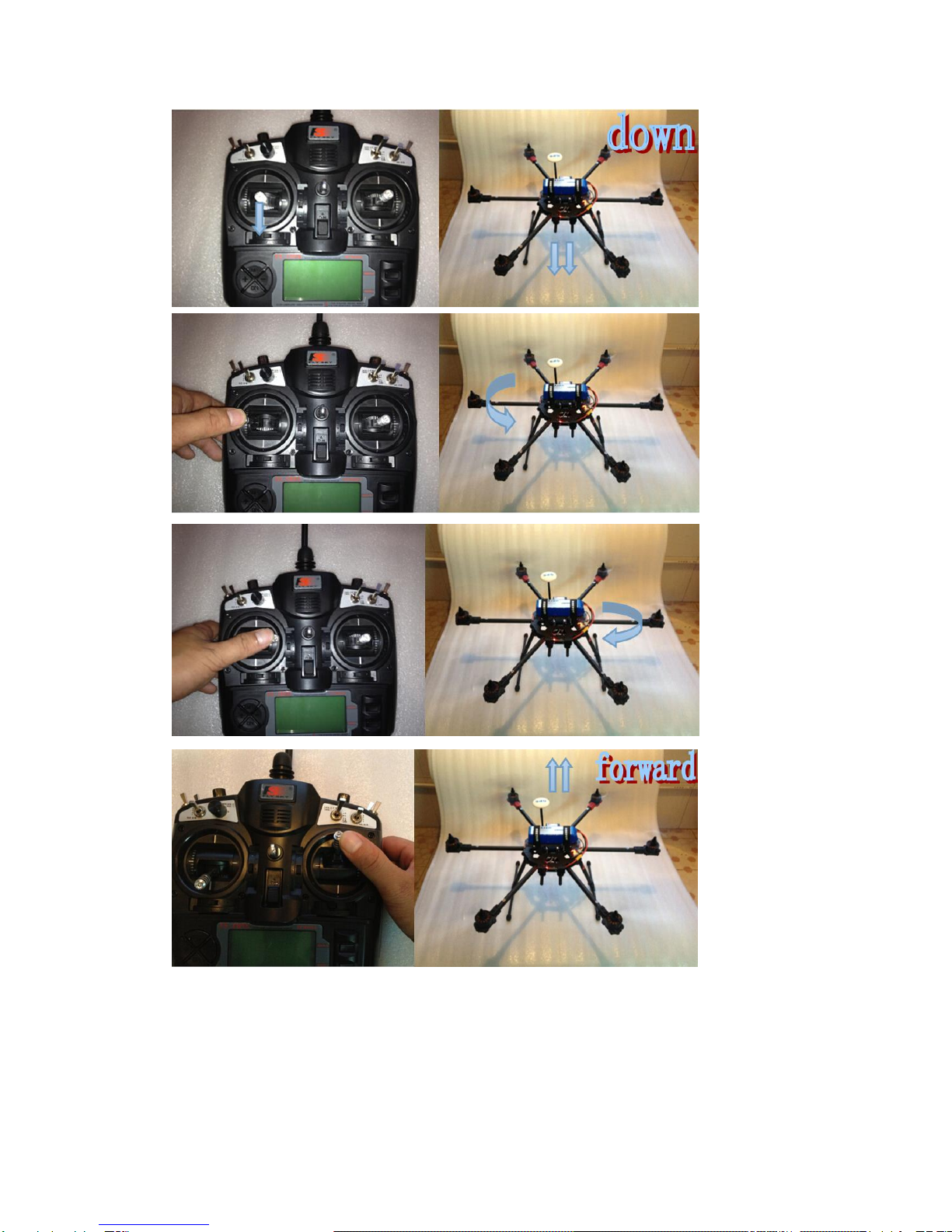
need recalibrate the magnetic field sensor. Calibration magnetic filed sensor method: Start motors and
take off, switch the aircraft to position hold mode, operate rotate left/right more than 3 circles, flight
controller will recalibrate magnetic field. This operation is very critical, it will directly affect its hovering
performance.
Attention: if need save permanently the calibration value of magnetic field, you must land and
wait GPS relocked and take off later, also, save the calibration value of magnetic filed by gyro
initialization.
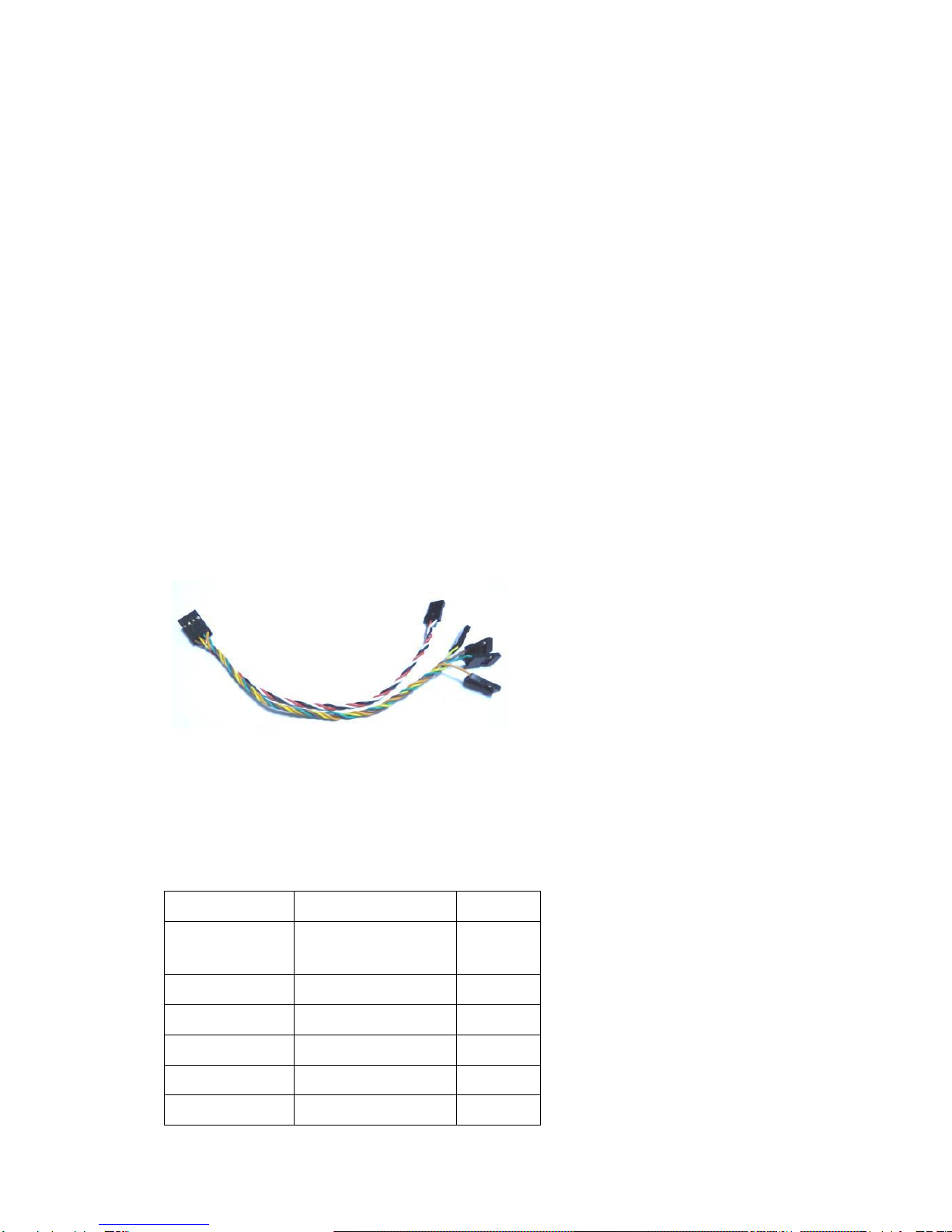
6. If not use the remote controller from factory, please pay attention to the receiver connection cables.
Receiver connection cables is according to the color order.
a) At least 6channel RC receiver.
b) The first 4 channels of receiver are respectively for output aileron(channel 1), elevator(channel 2)
throttle(channel 3) and rudder(channel 4).
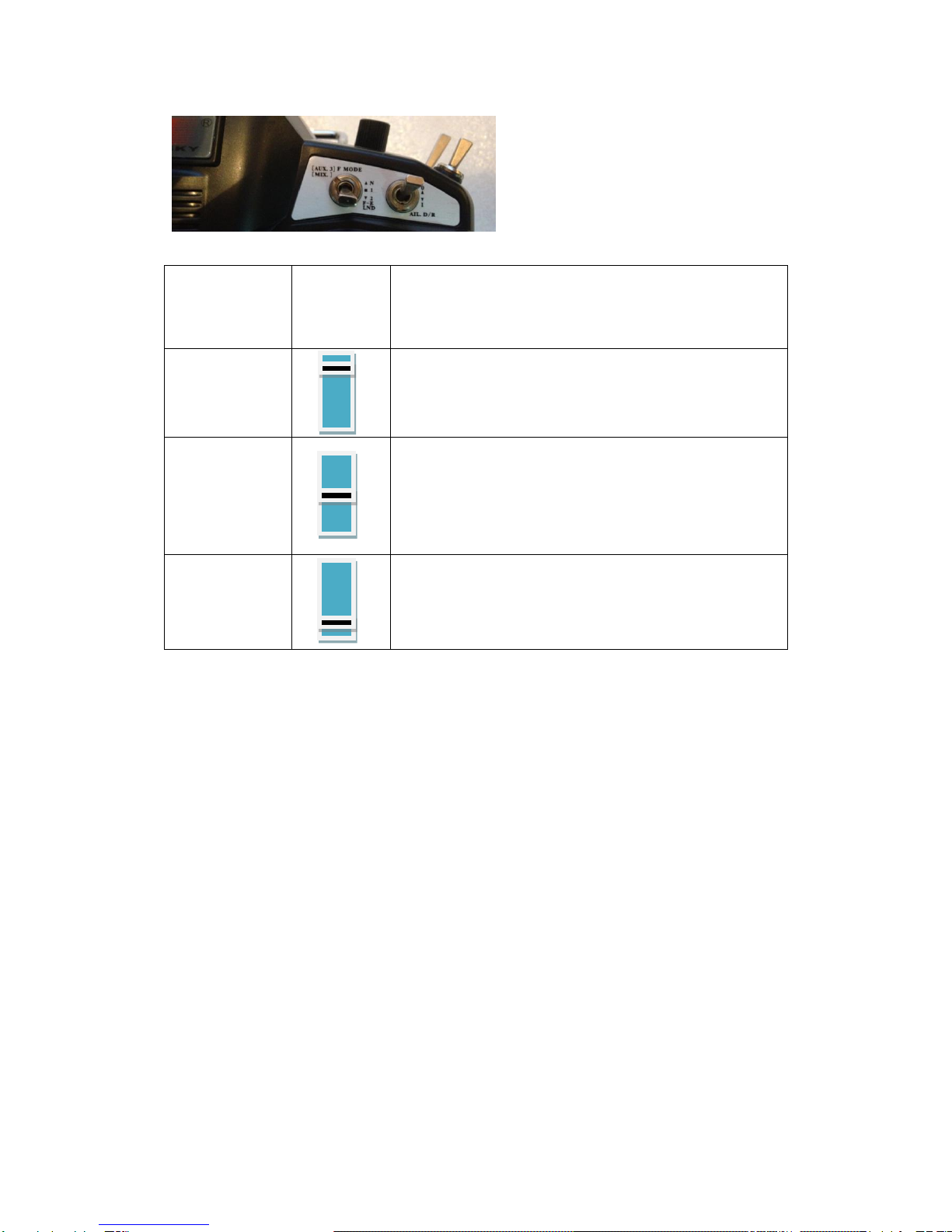
c) It will need a three-level switch(SW1) to control its working mode.
d) Blue cable(SW2) is unused, can not be connected.