ORT/RWT/SGR Series Transducer - CAN Bus Interface (RWT3536IM)
Revision 6, February 2021 - Page 6
overwhelming the receivers or blocking devices from transmission. If a high rate is
important, the message identifiers can be used to prioritise messages, lower numeric
identifiers have bus priority.
Torque
(Default Identifier 50)
Torque data can be output as a floating-point, fixed point or ASCII number. The byte
order for non-ASCII formats is controlled by Transducer Control.
Floating-point
The floating-point format uses the IEEE-754 standard (32bit). The floating-point
format is shown below:
SEEE EEEE EMMM MMMM MMMM MMMM MMMM MMMM
S –Sign Bit, E –Exponent, M –Mantissa.
Fixed-point
The fixed-point format is a 32bit signed integer number. The number is fixed with 3
decimal places (i.e. torque x 1000). For example, 100.1231, would be output as
100123
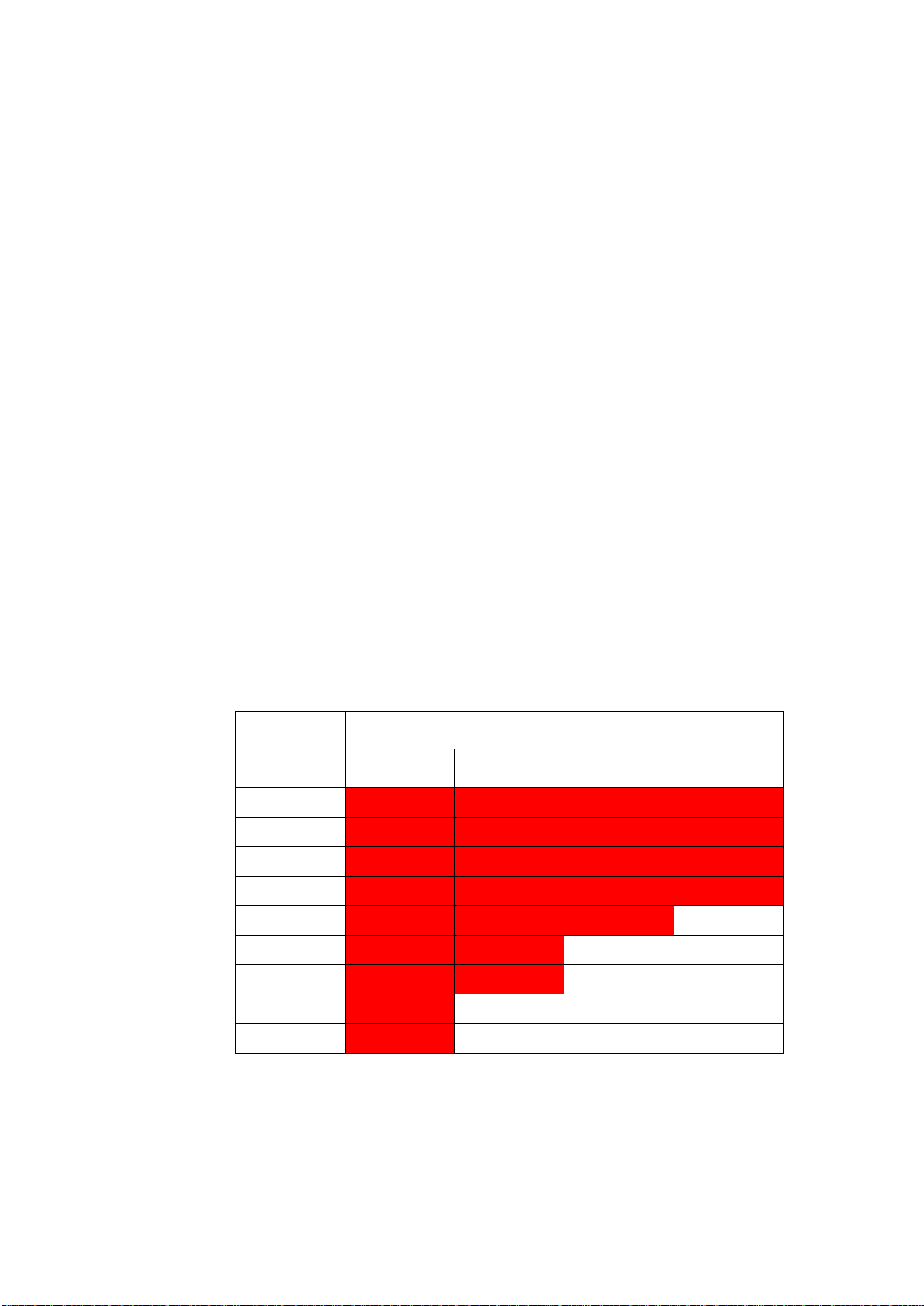
ASCII
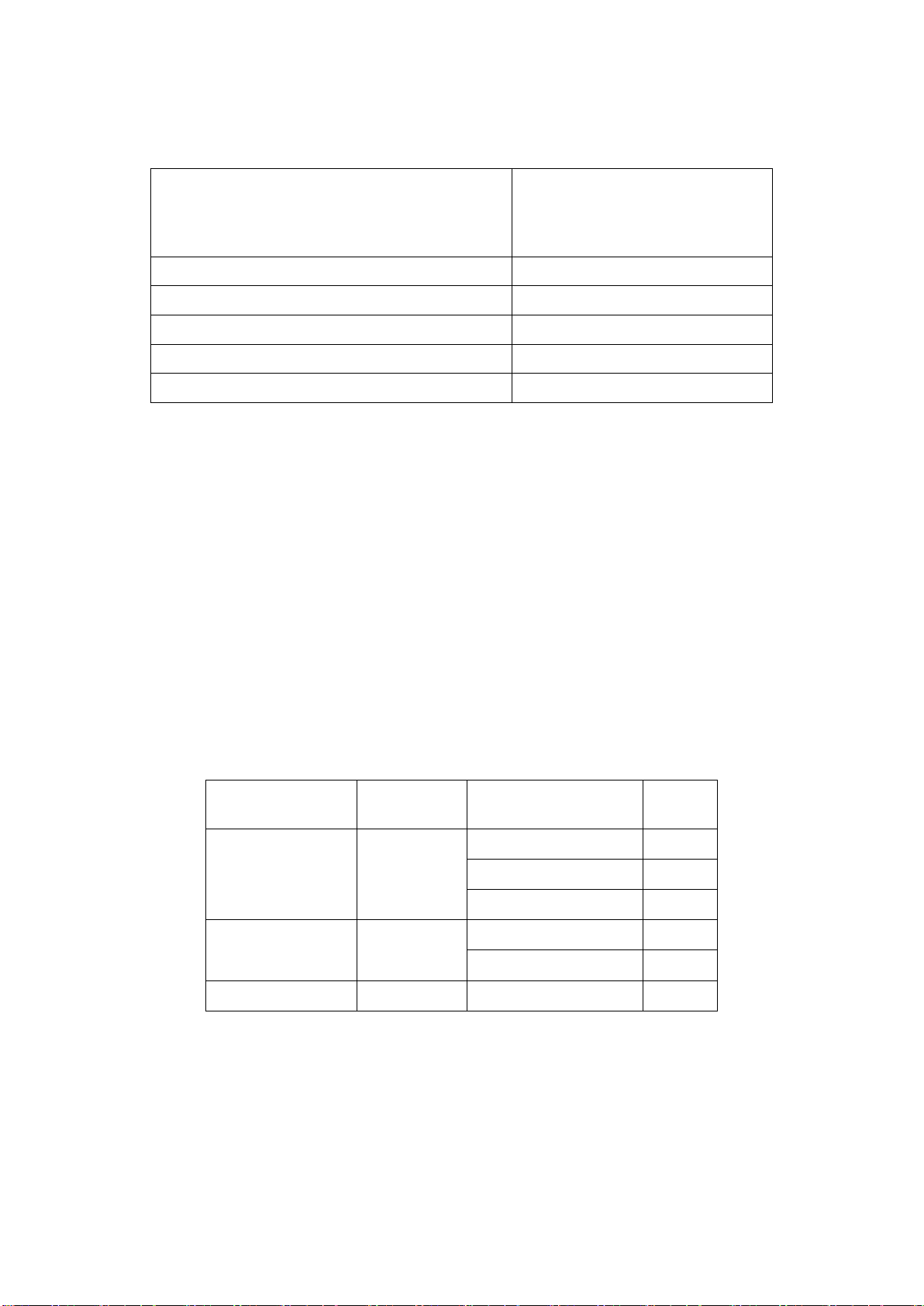
The ASCII format outputs data in a human readable text format. Text strings are 8
characters long and are prefixed with a sign character. The placement of the decimal
point is dependent on the full scale of the transducer, see Table 3:
Table 3:
Output Rate
The output rate is dependent on the configuration selected. If internal capture rate is
selected, the actual output rate is dependent on the baud rate, transducer technology
and transducer tuning. RWT/SGR transducers achieve a capture rate of around 5kHz.
ORT transducers have a capture rate of upto 50kHz.
Each baud rate carries a maximum output rate, if the capture rate exceeds this, it will
be capped, see the maximums in the CAN Configuration section (Table 5a/5b).