CGE-10 Gripper
Short Manual
Content
Revisions...........................................................................................................................................1
1 Specifications.................................................................................................................................2
1.1 Performance Parameter.......................................................................................................2
1.2 Dimensions..........................................................................................................................3
1.3 Indicator ..............................................................................................................................3
1.4 Pinout Description...............................................................................................................4
2 Modbus-RTU Control ....................................................................................................................5
2.1 Debugging software description .........................................................................................5
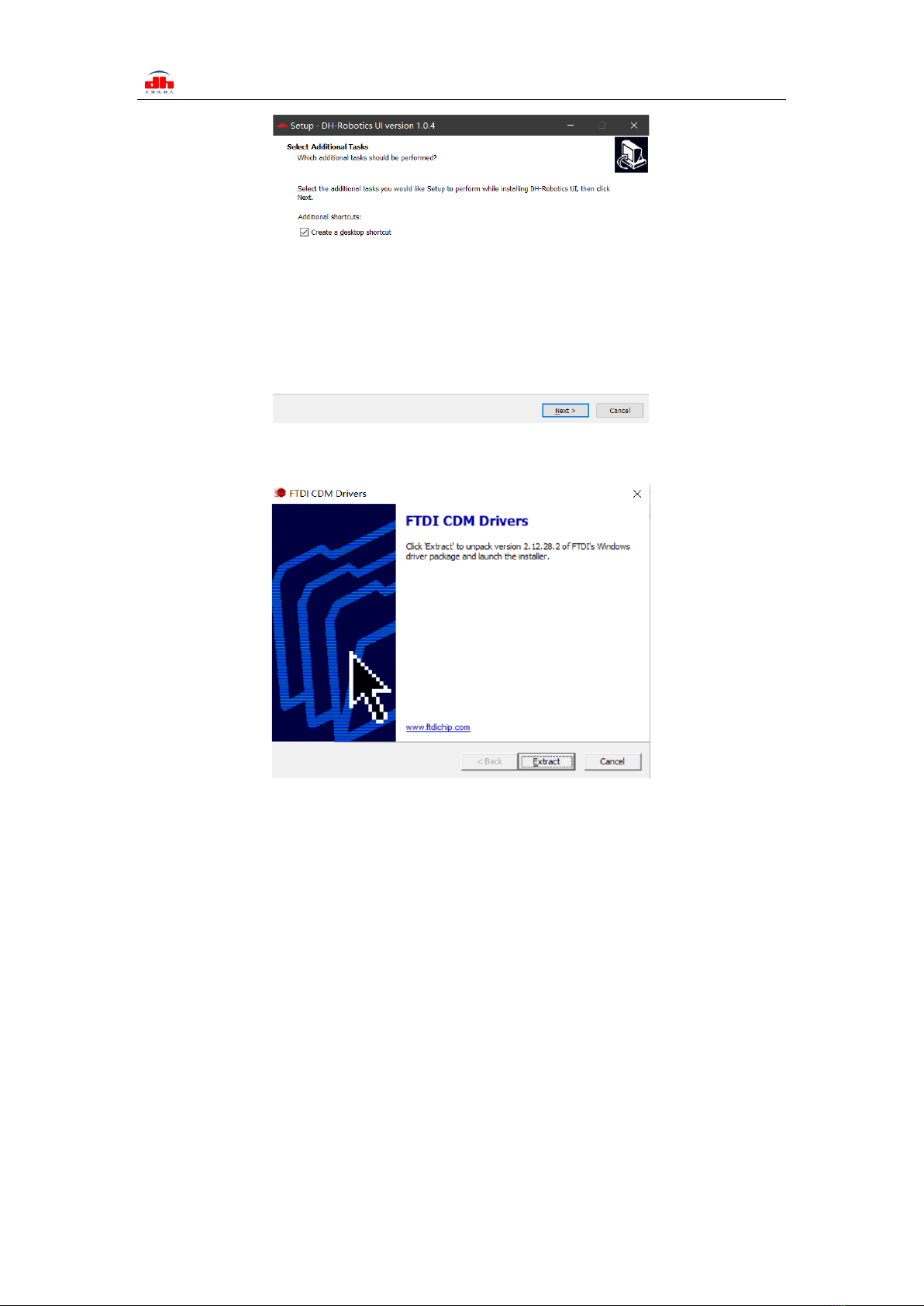
2.1.1 Installation and wiring of debugging software.........................................................5
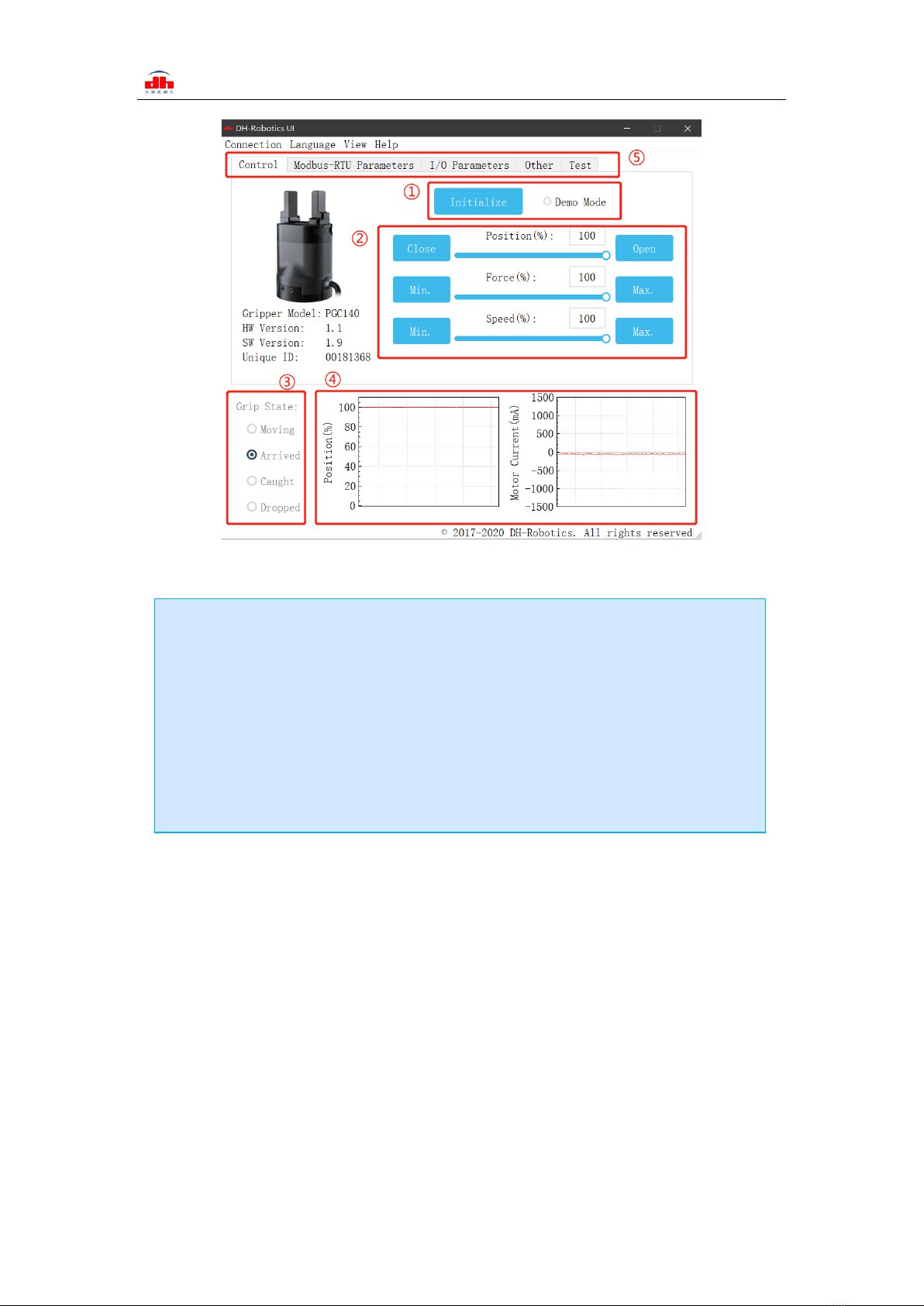
2.1.2 Debugging software instructions..............................................................................6
2.2 Default Communication Parameters ...................................................................................9
2.3 Modbus-RTU Description.................................................................................................10
2.3.1 RTU Framing .........................................................................................................10
2.3.2 Supported Modbus Function Code.........................................................................10
2.3.3 Register Mapping...................................................................................................10
2.3.4 Register Description...............................................................................................12
2.3.4.1 Initialization ................................................................................................12
2.3.4.2 Force............................................................................................................12
2.3.4.3 Position........................................................................................................13
2.3.4.4 Speed...........................................................................................................13
2.3.4.5 Initialization State .......................................................................................14
2.3.4.6 Gripper State ...............................................................................................14
2.3.4.7 Current Position ..........................................................................................15
2.3.4.8 Save Parameter............................................................................................15
2.3.4.9 Initialization Direction ................................................................................15
2.3.4.10 Slave Address............................................................................................16
2.3.4.11 Baud Rate ..................................................................................................16
2.3.4.12 Stop Bits....................................................................................................17
2.3.4.13 Parity .........................................................................................................17
2.3.4.14 Test I/O Parameters ...................................................................................18
2.3.4.15 I/O Mode Switch.......................................................................................18
2.3.4.16 I/O Parameter Configuration.....................................................................19
3 I/O Control...................................................................................................................................21